ロボットビジョン研究室(工学科機械コース)
| ロボットビジョン |
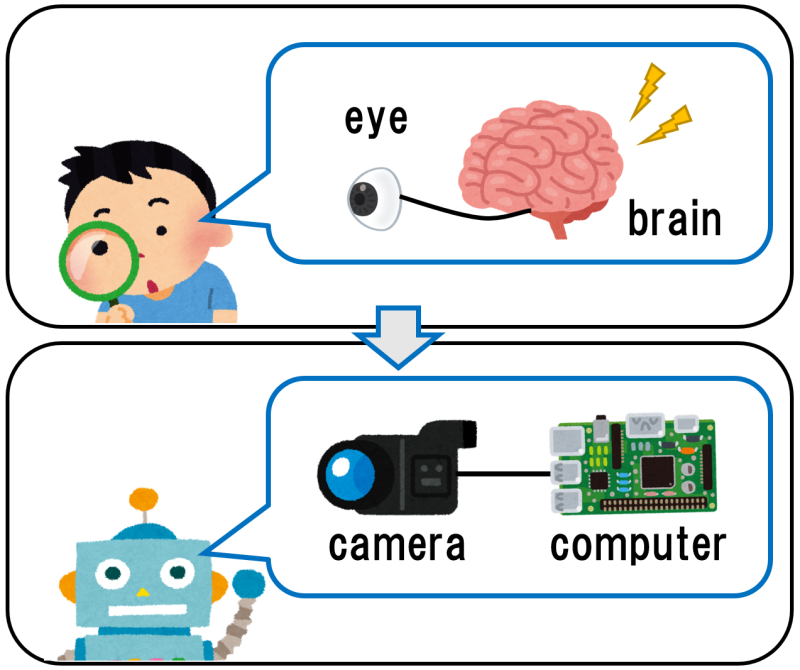
人間は感覚器(視覚・聴覚・触覚・臭覚・味覚)の情報を基に様々な知能的行動を実現しますが、実はその80%以上が視覚からの情報に頼っていると言われています。現在、世界では様々なロボットが登場していますが、人間のような高度な視覚機能を獲得しているロボットはほとんどありません。つまり、ロボットが目隠しをして動いているようなものです。ロボットに知能的な行動をさせるためには、目(カメラ)より入力される画像から周囲の情報を瞬時に読み取り、状況を判断することが重要です。ロボットが実環境で行動するためのビジョンシステムの構築を目指した研究、それがロボットビジョン研究室のメインテーマです。
| RoboCup(ロボカップ) |
RoboCupとは、自律移動ロボットによるサッカー競技を題材とした国際ロボコンプロジェクトであり、ロボット工学と人工知能の融合、発展を目標としています。西暦2050年に「サッカーの世界チャンピオンチームに勝てる、自律型ロボットのチームを作る」という目的に向かって,世界中のロボット研究者が技術力を競っています。本研究室では、構築したビジョンシステムの検証の場として、ロボカップサッカー中型リーグ(縦横50cm未満のロボットが5台でチームを構成し、22×14mのフィールドで試合をするリーグ)に2008年より参戦しています。
大会への出場結果などは活動成果にあります。

| ロボカップにおける自律移動ロボット |
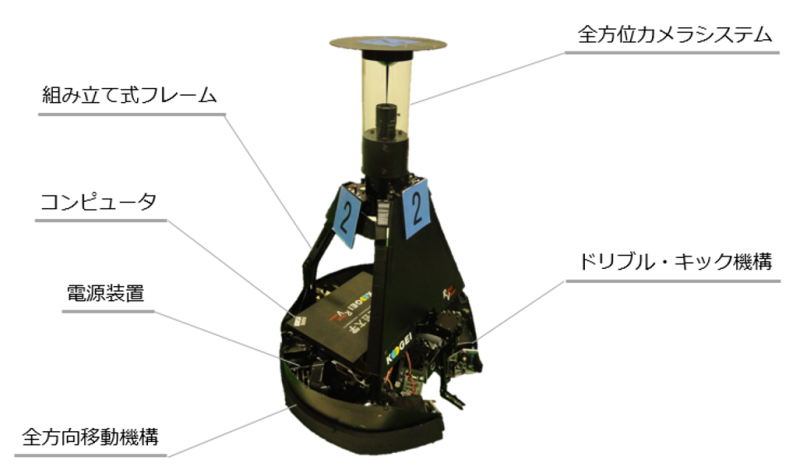
RoboCupに出場するロボットは、サッカーフィールド全域の環境情報を取得するために、360度の視野を持つ全方位カメラを搭載しています。また、フィールド内を縦横無尽に素早く移動することが求められるため、特殊な車輪を用いた全方向移動機構を備え、ボールを扱うエンドエフェクタやキックする機構も装備しています。本研究室では、これらハードウェアの製作・開発や、各種デバイスを使用したソフトウェアの研究・開発を行っています。
| 代表的な研究内容 |
| [ ソフトウェア:認識系 ] 全方位カメラを用いた環境認識技術 |
全方位カメラは、双曲面ミラーを用いて360度の視野を得る特殊なカメラです。ロボットが周囲環境を把握するためには非常に有用ですが、非線形形状のミラーを介して外界を撮影するため、その画像は大きく歪みます。画像に対して色変換などの画像処理を行い、形状情報も参考にして含まれる物体を認識します。さらに、画像中の位置から実際の距離に変換することで、ロボット周囲の環境情報を構築し、ロボットの行動判断に活かします。
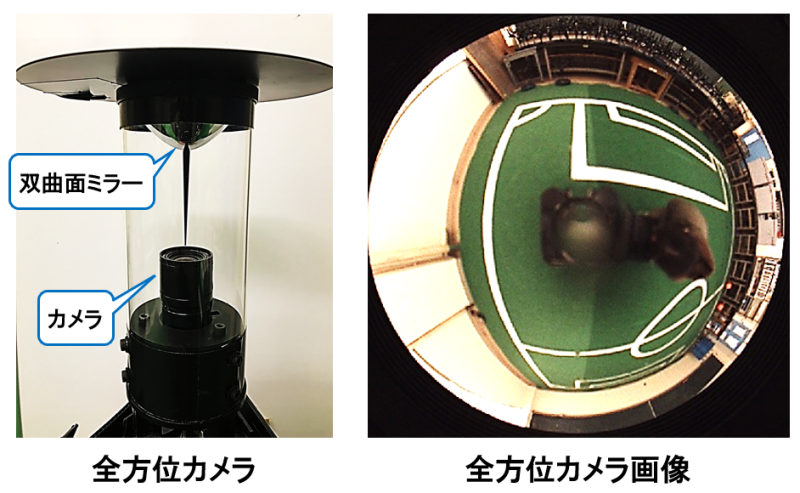
【動画説明】
左:元画像
右:抽出画像
緑(フィールド)
青(白線)
橙(ボール)
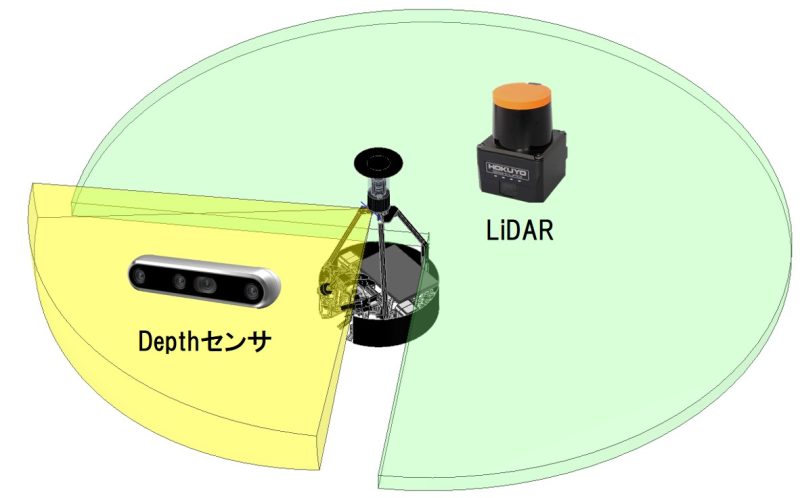
| [ ソフトウェア:認識系 ] 複数センサを用いた障害物認識技術 |
ロボットが行動する際に周囲の障害物(味方や敵ロボット、審判など)を事前に把握していることは、無駄のない行動計画や衝突回避のために重要です。全方位カメラは視野が広いですが、特に遠方の距離精度に問題があるため、Depthセンサ(距離センサ)やLiDAR(レーザセンサの一種)と組み合わせることでより正確な障害物情報を得ることができます。
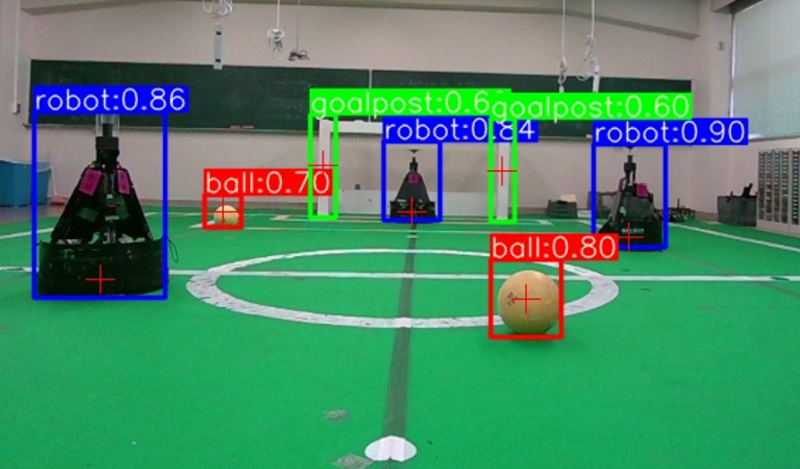
| [ ソフトウェア:認識系 ] 深層学習(Deep Learning)を用いた物体認識技術 |
ロボットが活動する際に周囲環境情報を安定して得ることが重要ですが、見る角度によって形状が変形するゴールや、常に姿勢が違う審判(人間)のような対象物を単純な手法で識別することは困難です。事前に膨大な画像情報を学習させることで、新規に入力された画像中に含まれる物体を識別する深層学習(Deep Learning)を用いて、様々な状況において安定した物体識別を実現します。
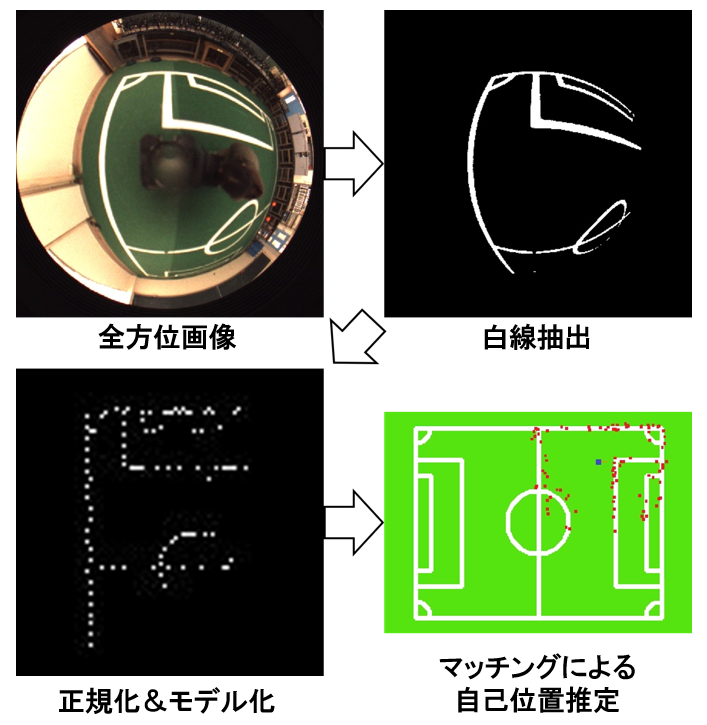
| [ ソフトウェア:最適化系 ] 遺伝的アルゴリズム(GA)を用いた自己位置同定技術 |
ロボットが環境中の自身の位置(座標&姿勢)を認識する技術は自己位置同定と呼ばれ、全ての行動の起点となるため非常に重要なです。環境内の指標から自身の位置を推定しますが、動的環境における現在位置情報であるため、推定の精度と実時間性が求められます。実時間性を得るためには、推定の最適化を短時間で終える必要があり、本研究では、遺伝的アルゴリズム(GA)という最適化手法を用いることで高速な処理を実現しています。
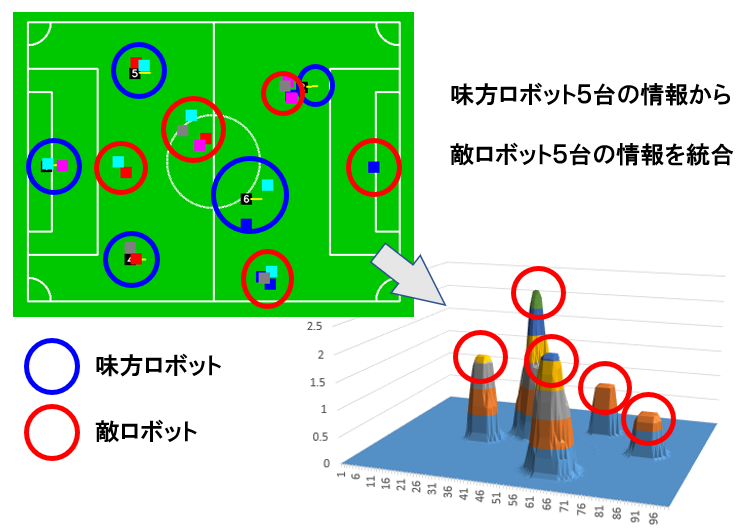
| [ ソフトウェア:最適化系 ] 複数ロボット間の情報統合技術 |
1台のロボットで得た周囲環境情報は、様々な要因で誤差や誤情報を含みます。フィールド上にいる他の味方ロボットの情報を得て統合することで、見えている対象物の確からしさや、見えていない対象物の情報などを得ることができます。大量に得られた情報に対して、提供元ロボットの状況(その対象からの距離など)を加味して適切に情報統合することで、環境認識精度を向上させます。
| [ ソフトウェア:行動計画系 ] 自律移動ロボットにおける行動計画技術 |
得られた環境情報を元に、目的地に対してどのような経路で移動するかを決定することは行動計画(パスプランニング)と呼ばれます。移動経路上に存在する複数の敵ロボットや審判の位置情報を考慮し、目的地(ボールや敵ゴール)に対して早く、かつ安全に移動できる経路を選定します。
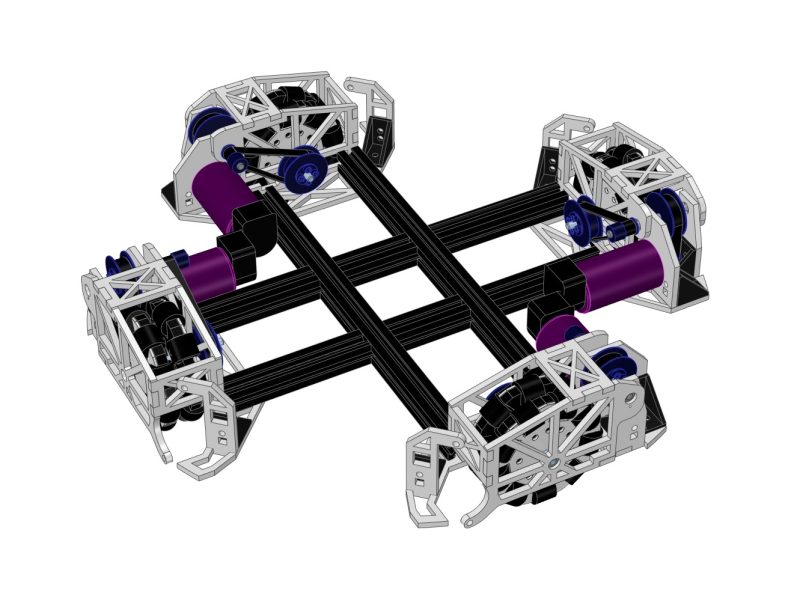
| [ ハードウェア:駆動系 ] 全方向移動機構の開発と制御 |
ボールをドリブルしながらゴールを目指すサッカーロボットの移動機構としては全方向移動機構が有用です。全方向移動機構とは、特殊な車輪(オムニホイールやメカナムホイール)を用いることで、姿勢を変えずに移動方向を変化できる移動機構です。カーボンファイバやジュラルミンを用いて全方向移動機構を開発し、その効率的な制御を行います。
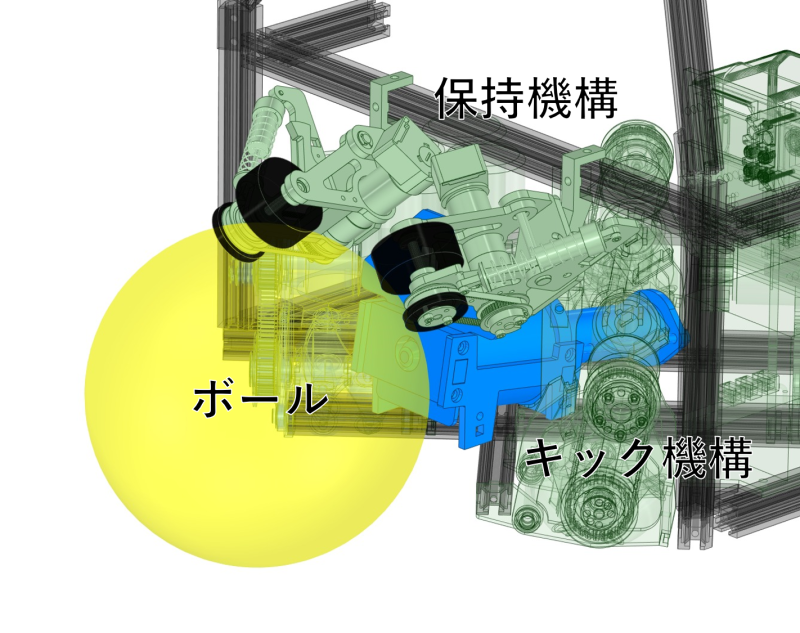
| [ ハードウェア:エンドエフェクタ系 ] ドリブル機構とキック機構の開発 |
サッカーロボットに必要な特殊機構として、ボールを扱うドリブル機構と、ボールをパス&シュートするキック機構があります。ルールによりボールは常に自然な方向に回転する必要があるため、ロボットの行動に合わせて適切にボールを扱い、巨大なソレノイドを用いた射出機構でボールを蹴ります。