参加ロボコン(ロボコンプロジェクト)
| ロボカッププロジェクト | TOP↑ |
| ロボカップとは |
ロボカップは、日本の研究者が始めた自律移動ロボットの国際的なロボットコンテストで、当初サッカーロボットから始まり、現在ではレスキューロボット、ホームロボット、工業ロボットなど、様々な分野で技術が競われています。原点のロボカップサッカーは、「2050年までに、サッカーの世界チャンピオンチームに勝てる自律移動人型ロボットチームを作る」を目標に活動を続けており、要素技術毎に以下のリーグに分かれています。

| 中型リーグ(これに出場中!) | 小さい体育館サイズ(22x14m)のサッカーフィールドで1チーム5台で戦う。ロボットの大きさは縦横50cm未満、高さ80cm未満、重量40kg以内。ボールは通常のサッカーボールを使用。全てのデバイスがロボット内で完結する完全自律である必要があり、周囲環境の認識も自身のカメラのみ(ローカルビジョン)で行わなければならない。 ロボカップ中で一番大きなサイズのロボット&フィールドで迫力あるサッカーが繰り広げられる。 | |
| 小型リーグ | 小さい教室サイズ(9x6m)のサッカーフィールドで1チーム6台で戦う。ロボットの大きさは手のひらを広げたぐらいのサイズ。ボールはゴルフボールを使用。天井に取り付けられたカメラ(グローバルビジョン)を用いて位置情報を得られる。 天カメにより位置情報が与えられていることと、サイズ的な理由によりロボットのスピードが速く、スピーディな試合が繰り広げられる。 | |
| 人型リーグ ヒューマノイドリーグ | 小さい教室サイズ(9x6m)のサッカーフィールドで1チーム3台の二足歩行ロボットが戦う。ロボットのサイズ(身長)によってさらに細分化されている。ボールはハンドボールサイズで、完全自律である必要がある。 目的に一番近い形状のリーグだが、歩行してサッカーをすることは非常に難しい。 | |
| 標準プラットフォームリーグ | 全チームが同じ標準ロボットを使用して戦う。標準ロボットは二足歩行ロボットNAO。ソフト組込みの戦い。動きがコミカルなので一般客に人気が高い。 | |
| シミュレーションリーグ | 実際のロボットを使用せず、サーバ上のAIのみで対戦する。見た目がサッカーゲームであるが、それぞれのプレイヤー毎の認識系で制御されているので、サッカーゲームの対戦AIとは別物。 |
| 東京工芸大学ロボカップ中型リーグ出場チーム:RV-Infinity |
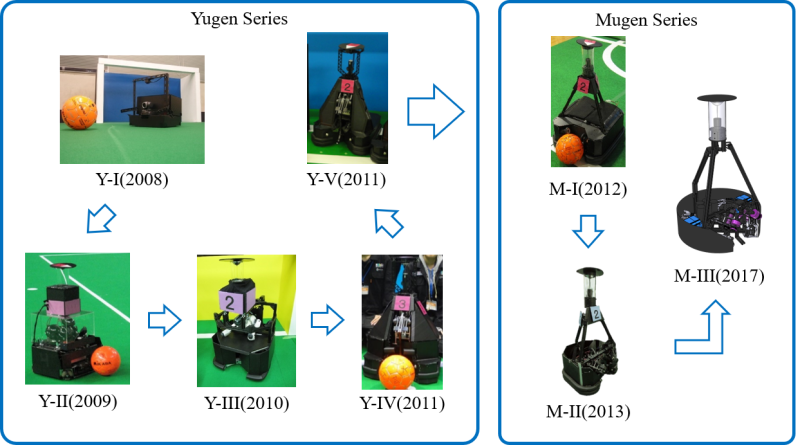
ロボットビジョン研究室とからくり工房の合同チームは、2008年にテクニカルチャレンジのみ参戦、翌2009年よりロボカップ中型リーグ本戦に出場しています。当初はKoogei-RVというチーム名で出場していましたが、2014年よりチーム名をRV-Infinityに変え、現在まで国内外で様々な成果を残しています。研究室メンバーが、各種要素の研究&技術開発を担当し、からくり工房メンバーがロボットの製作と調整などを担当します。ロボットも大きく、台数も多いため、開発にも時間と人数を要しますし、大会出場時も大人数で参加することになります。大会の戦績等はこちら。

| RV-Infinityの出場ロボット |
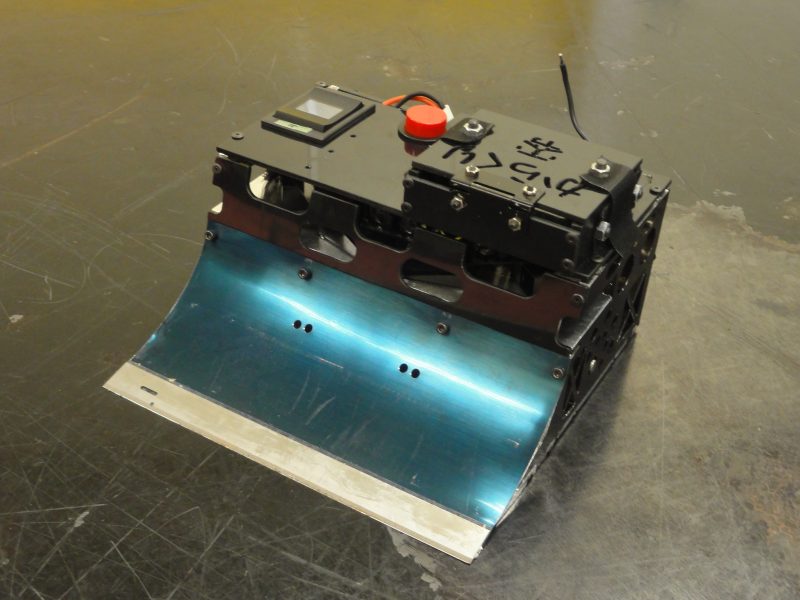
参加当初は研究室でAIBO(ソニーの犬型ロボット)を研究していたこともあり、ロボットがロボット(AIBOがサッカーロボ)を操縦して戦う!をテーマにしていましたが、徐々に実戦に特化したスタンダードマシンになっていきました。カメラやモータのような購入するしかない製品以外は極力自作するスタイルが特徴で、ロボットの構造用各パーツはもちろん、タイヤ等のハードウェアの設計から製作をすべて大学内で完結させるので、開発スピードが速いです。初参加からしばらくは毎年フルモデルチェンジしていました。現在はある程度ベースとなるところは落ち着いているのでフルモデルチェンジとはいきませんが、毎年、挑戦的な改良を続けています。

| マイクロマウスプロジェクト ロボトレースプロジェクト | TOP↑ |
| マイクロマウスとは |
マイクロマウスとは、小型自律移動ロボットが迷路を走り抜ける速さと知能を競う競技です。当初アメリカから始まり、国内でも40年以上の歴史を持つ、もっとも古いロボットコンテストと言われています。長年継続して開催される中でいくつかの競技に分かれ、現在では以下の3つの競技が開催されています。夏ぐらいから9つの地区大会(東北、北陸信越、東日本、金沢、中部初級者、中部、関西、九州、全日本学生の各大会)が開催され、そこで資格を得たロボットが冬に開催される全日本大会に出場できます。

 | クラシックマウス競技 1区画18x18cm、全体16x16区画の迷路サイズで構成されるマイクロマウス大会初開催からずっと続く最も古い競技です。スタート(端の1区画)とゴール(中央の4区画)のみがロボットに情報として与えられています。その他の壁情報は一切与えられないため、迷路をロボット自身が探索しながらゴールを目指します。持ち時間5分、走行回数5回の中で、効率良く探索し、最短経路を導出して賢く走ることが求められます。狭い迷路を走り回るため、ロボットの走行精度がカギとなります。 | |
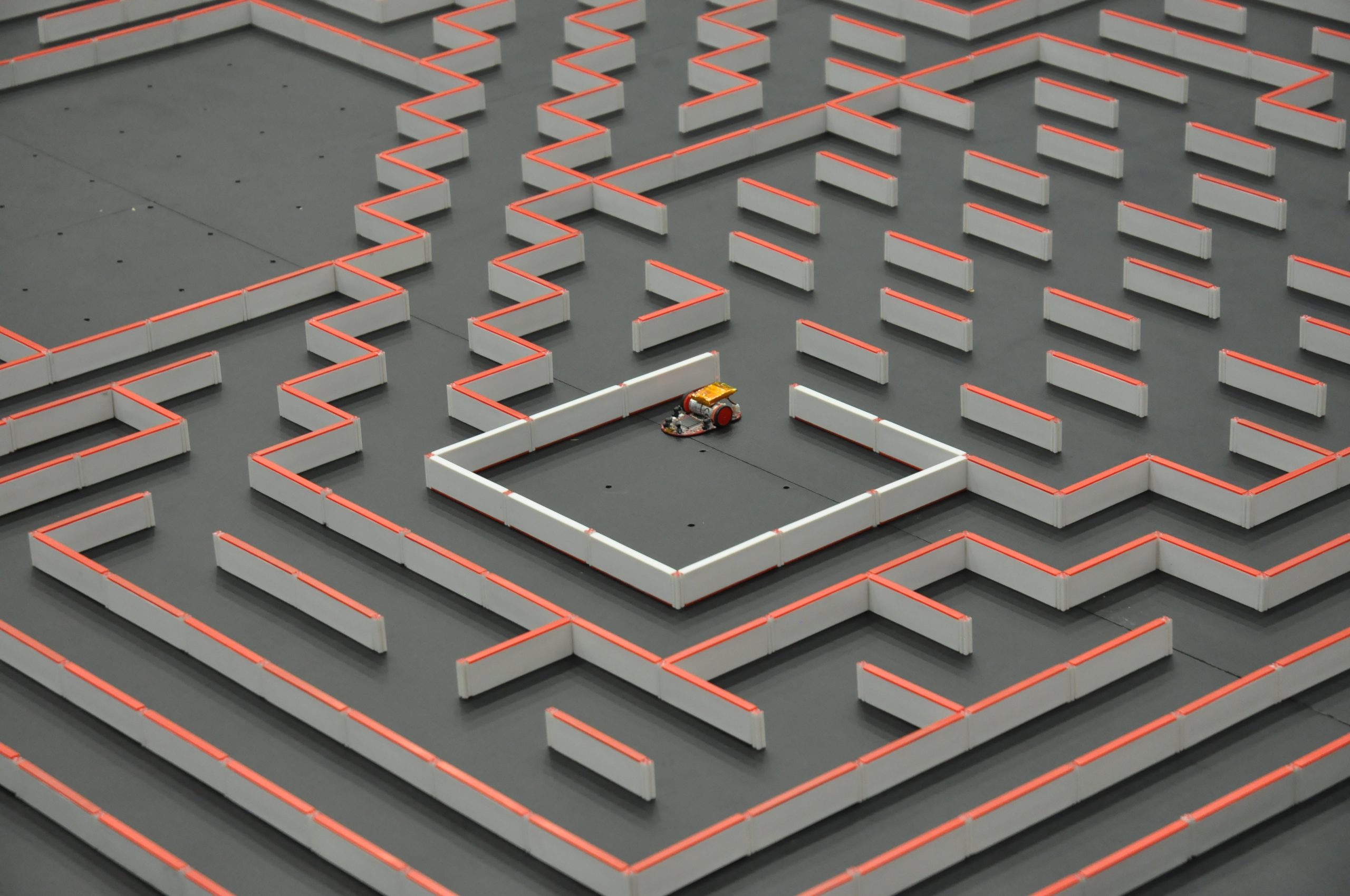 | マイクロマウス競技 進化した超小型マウス競技として2008年よりスタートした競技です。区画サイズがクラシックマウス競技の半分、迷路サイズが倍の、1区画9x9cm、全体32x32区画という迷路サイズで構成されます。スタート区画&ゴール領域の情報のみがロボットに情報として与えられるのは同じですが、ゴール領域は中央とは限りません。クラシックマウスと比較して縦横高さがそれぞれ半分の体積比1/8でロボットを構成する必要があるため、高い技術力が求められます。 | |
 | ロボトレース競技 直線と円弧で構成された白線コースを走破するスピード競技です。基本的にはライントレース競技ですが、各コーナーの曲率変化点にコーナーマーカーがあるのが特徴で、1週目でコースの形状を記録します。2周目以降は記録した形状から、直線加速とコーナー減速を効率良く賢く行うことで、より早いタイムを目指します。 |
| からくり工房の出場ロボット |
からくり工房では、1年生はカリキュラム教材でクラシックマウス競技に参加します。お勉強用の教材なのでそれほど早いロボットではありませんが、基本技術まではきちんと到達できる内容になっており、毎年多くの完走者を出しています。カリキュラム教材の詳細はこちら。
2年生以上のプロジェクトメンバーは、教材を独自にブラッシュアップして走行性能を上げて出場したり、教材の知識を活かして新作マウスを作ったりしています。
| ロボット相撲プロジェクト | TOP↑ |
| ロボット相撲とは |
ロボット相撲とは、その名の通りロボット同士の相撲競技です。直径154cmの黒い円形鋼板で製作された土俵上で、20×20cm・重量3kg以内の相撲ロボット2台が3分3本勝負で戦います。様々なタイプの相撲ロボットが出場しますが、基本的には力と力のぶつかり合いなので大出力モータの力をいかに上手く制御して戦略通りに動作させるかがカギとなります。大きな力がぶつかり合うので、頑丈な車体製作も重要な要素です。操縦方式は無線式と自立式があり、からくり工房では自立型へ参加しています。

| からくり工房の相撲ロボット |
からくり工房相撲班のロボットは、比較的基本構成のロボットとなっています。モータはマクソンモータ、ブレードはフェザー安全剃刀製、底面にはネオジウム磁石を多数配置し、タイヤは自作でシリコン製となっています。
ミニクラス(10x10cm、500g、吸着&鋭利ブレード禁止)が始まるようですので、今後ミニに移行するかどうか現在検討しているところです。